


Seadme tööpõhimõteplanetaarne rullkruvion: sobitusmootor paneb kruvi pöörlema ja haakerullikute kaudu muundatakse mootori pöörlemisliikumine mutri lineaarseks edasi-tagasi liikumiseks. Planetaarne rullkruvi ühendab spiraalliikumise ja planetaarse liikumise, mis sobib väga hästi ulatuslikeks olukordadeks, kus on suuremad jõudlusnõuded.
Planetaarne rullkruvi on näidatud joonisel. Selle peamised komponendid on:
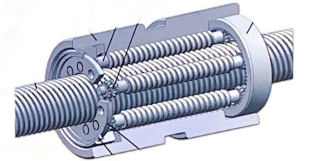
Kruvi, selle keermeprofiil on täisnurkne kolmnurk (keermed 3 ja enama peaga)
Pähkel, selle sisekeerme profiil on sama mis kruvil.
Rull, ühe algusega keerme, iga rulli otsas on silindriline pöördliigend ja deflektorplaadi ümarasse auku paigaldatud hammasratta pöördliigend, et tagada rullide ühtlane jaotumine radiaalsuunas. Hammasratta hambad haakuvad sisemise rõngashammasrattaga, võimaldades rullil sujuvalt edasi liikuda.
Rkinnitusrõngasdeflektorit lukustades.
Lame võtikasutatakse käitatavate objektide ühendamiseks. Sellel on lihtne konstruktsioon, seda on lihtne lahti võtta ja kokku panna ning sellel on head hekkimisomadused. See sobib suure kiiruse, muutuva koormuse ja löökide korral.
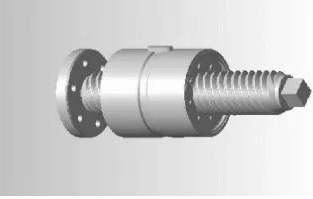
Pöördplanetaarne rullkruvi, tuntud ka kui pöördrullkruvi ja pöördplanetaarne rullkruvi, viitab lineaarsele ülekandeseadmele, milles rullide paigutus või liikumissuund on vastupidine tavapärase planetaarse rullkruvi omale.
Pöördplanetaarne rullkruvi on väikese suurusega ja talub suurt koormust. Raamita mootoriga saab seda kasutada humanoidrobotite käte, jalgade, puusaliigeste jms jaoks.
Standardsete planetaarrullkruvide eelised on suur kiirus, tugev kandevõime ja suur täpsus. Efektiivne käik võib ulatuda üle meetri, mistõttu need sobivad väga hästi äärmiselt raskete koormuste keskkondadesse.
Humanoidne robot kruvi uue vabastuspunkti jaoks. Trapetsikujuline kruvi jakuulkruviMehaaniliste tööpinkide valdkonnas on see rakendus välja kujunenud. Planetaarrullkruvi on praegu saadaval ainult lennunduses ja muudes tipptasemel rakendustes. Tesla humanoidmasina 14 lineaarvõtmega kruvid on 8-10 rullikuga.
Postituse aeg: 06. detsember 2024




